
More progress using a PIC microcontroller to generate video. What next? Color is easy. Animations perhaps?
PS: If you start looking, these guys are everywhere.

More progress using a PIC microcontroller to generate video. What next? Color is easy. Animations perhaps?
PS: If you start looking, these guys are everywhere.
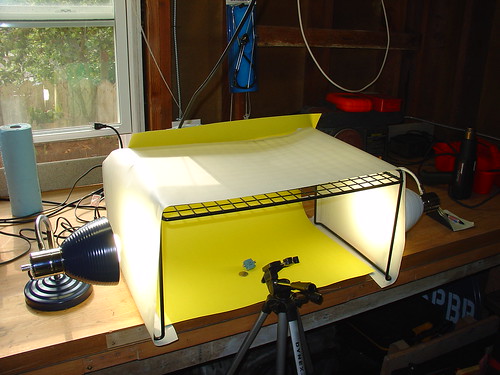
I have always struggled to take decent macro photos of small objects to document my hobbies. I finally got fed up with poor lighting and blurry shots and decided to build my own light tent to solve the problem. There are lots and lots of examples on the web showing how to build a DIY light tent. I wanted something cheap, small, and portable, so I merged ideas from a couple existing designs and used some scrap materials I had in the garage. In the end I managed to make a light tent for about $35.
The major components are:
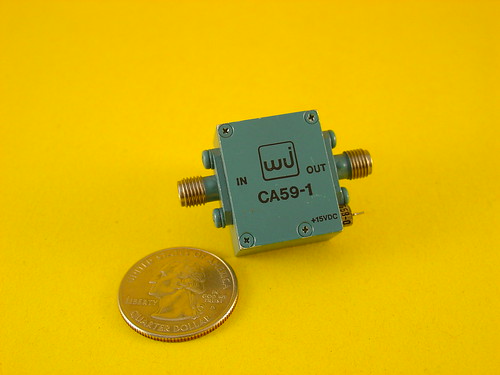
The results are really spectacular. Now I can take macro shots of small objects without the glare and lighting problems I have experienced in the past. For an example check out the photo below or see the complete set on flickr.
“Wiring harnesses are an essential and often overlooked part of any electrical system. On a car, a good wiring harness can make the difference between a weekend joyride and a long tow home. Building a quality wiring harness requires a couple inexpensive tools and the right techniques…”
The Maker Faire is an event held twice a year (alternating between San Mateo, California and Austin, Texas) by the folks at Make Magazine, one of my favorite publications from O’Reilly. The event centers on DIY culture, covering everything from making combat robots to felting and needlepoint.
This year I participated in the 2008 Bay Area Maker Faire in San Mateo and showed people how to make better wiring harnesses for things like cars and electronic projects.
During the Maker Faire I handed out a one page tutorial with information about where to buy the tools and supplies as well as the steps needed to create a template and make a wiring harness from scratch.
Here is a pdf version of the handout.
Or grab it in .png format, click on the image below for a full size version.

Check it out and let me know what you think.